

Շրջված ճոճանակ
Իրականացվում է հետադարձ կապի օգնությամբ հավասարակշռված համակարգի նախագծում. ոչ գծային անկայուն համակարգի հիման վրա, որպես նպաստավոր փորձարարական հարթակ կառավարման համակարգերի տեսության ուսուցման և փորձարկումների իրականացման համար: Կառավարման համակարգերի կայունություն և կառավարելիություն շրջված ճոճանակի հիման վրա, հետազոտական համակարգ ժամանակակից կառավարման համակարգերի տեսության հետազոտման համար:
Միկրոշարժիչներ
Միկրոշարժիչների և ավտոմատ միկրոշարժիչների կարգավորման հետազոտում: ՀՀ շարժիչի արագության և դիրքի ղեկավարում, միակոնտուր, երկկոնտուր ղեկավարմամբ դինամիկ բնութագրեր և այլն:
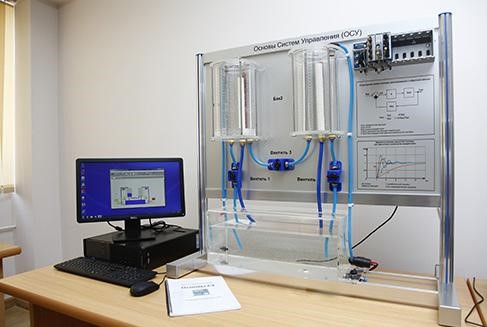
Կառավարման համակարգերի հիմունքներ
Իրականացվում է ավտոմատ կառավարման համակարգի էլեմենտների ուսումնասիրում. MPX4115A մոդելի ճնշման տվիչի հետազոտություն, PING ուլտրաձայնային տվիչի հետազոտություն, բակում հեղուկի մակարդակի ղեկավարման գծային ավտոմատ կառավարման համակարգ (Հ, ՀԻ և ՀԻԴ կարգավորիչ), ոչ գծային ավտոմատ կառավարման համակարգ (Հ, ՀԻ և ՀԻԴ կարգավորիչ), երկչափ գծային ավտոմատ կառավարման համակարգ (Հ, ՀԻ և ՀԻԴ կարգավորիչ), երկչափ ոչ գծային ավտոմատ կառավարման համակարգ (Հ, ՀԻ և ՀԻԴ կարգավորիչ):

